MAVLINK interface for UAV cameras
Support for cameras
MAVLink or Micro Air Vehicle Link is a protocol for communicating with UAV (Unmanned Aerial Vehicle). It is designed as a header-only message marshaling library. MAVLink was first released early 2009 under the LGPL license. Workswell cameras support recieving range of common as defined in MAVLink Common Message Set as well as MAVLink GPS messages.
MAVLink, which stands for Micro Air Vehicle Link, is a lightweight messaging protocol used to exchange data between unmanned aerial vehicles (UAVs) and ground control stations (GCS). It was developed by Lorenz Meier at ETH Zurich in Switzerland in 2009, and since then it has become one of the most widely used protocols in the drone industry.
The MAVLink protocol is designed to be platform independent, meaning that it can be used with different types of UAVs and GCSs, regardless of the operating system or hardware. This makes it very flexible and easy to implement in a wide range of drone applications.


MAVLink messages are organized into packets, each of which contains a header and a payload. The header includes information about the sender, the recipient, and the message type, while the payload contains the actual data being transmitted. The data can include information about the drone’s status, such as its position, altitude, and battery level, as well as commands for controlling the drone’s behavior.
One of the key advantages of MAVLink is its extensibility. The protocol allows developers to define their own custom messages, which can be used to transmit any type of data that is not already included in the standard set of messages. This makes it easy to add new features and functionality to drones without having to modify the core MAVLink code.
Another advantage of MAVLink is its low overhead. The protocol is designed to be very efficient in terms of the amount of data it transmits, which is important for drones that have limited bandwidth and processing power. This allows UAVs to send and receive data quickly and reliably, even in challenging environments.
Overall, MAVLink is a powerful and flexible protocol that has become a cornerstone of the drone industry. Its lightweight design, extensibility, and low overhead make it an ideal choice for a wide range of applications, from hobbyist drones to professional UAVs used for research, mapping, and inspection.
The MAVLink protocol is supported by the following Workswell cameras: WIRIS Pro, WIRIS Pro SC, WIRIS Security, WIRIS Agro, GIS-320.
Possibilities of controlling
MAVLink interface for UAV cameras protocol offers very comprehensive options for controlling the thermal camera. To illustrate the possibilities of this implementation, we would like to show some of the possibilities of communication. However, these are only selected examples, the possibilities of controlling Workswell thermal camera:
- Do trigger control – enacts the trigger.
- Image start capture – starts periodic capturing or takes picture.
- Video start streaming – enables the RTSP stream.
- Storage information – information about a storage medium.
- Camera stream status – video stream status flags.
- GPS_status – the positioning status, as reported by GPS.
- Global position – the filtered global position; fused GPS and accelerometers data.
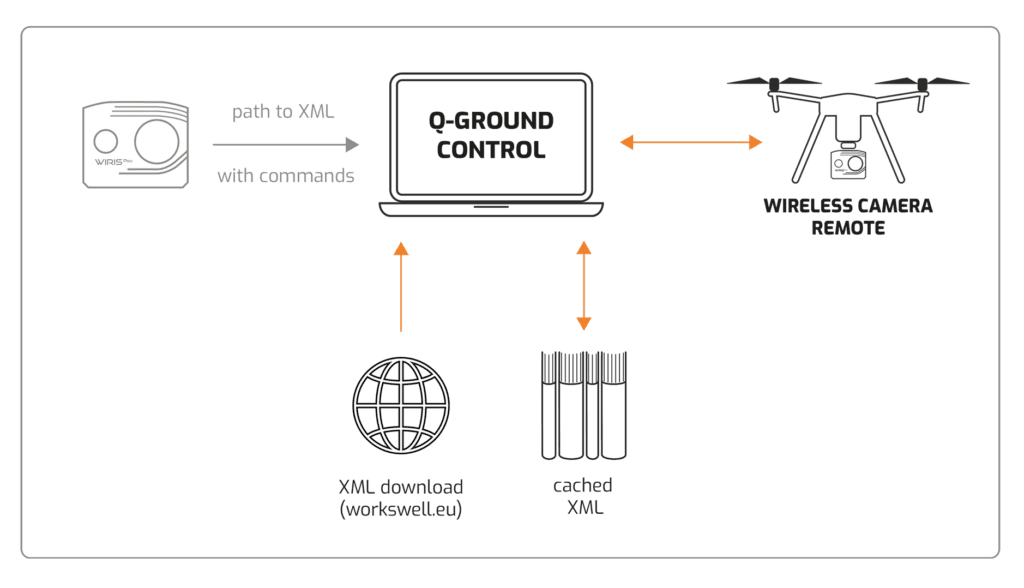
MAVLink protocol communication scheme
Important documents
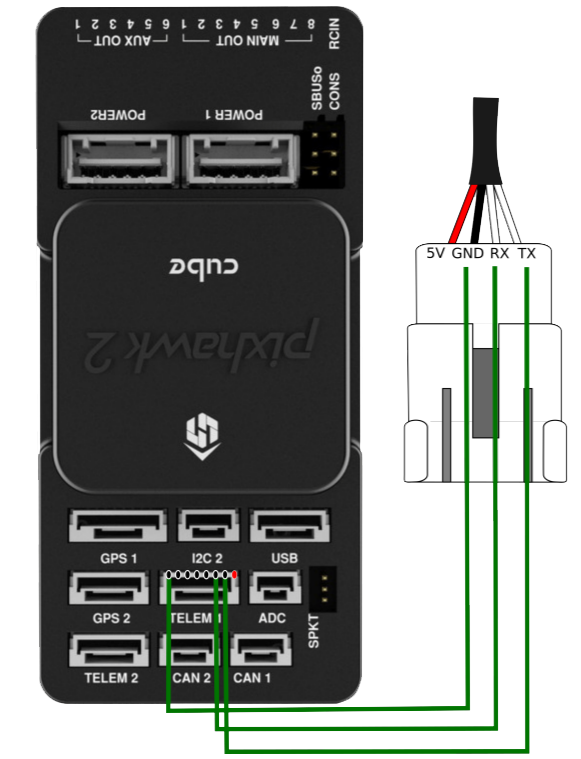
Autopilots or any device supporting MAVLink messages can be connected to the camera unified interface cable with a 4 pin connector. As for the physical layer, the camera system is designed for UART with operating voltage of 5 V, although it is tolerant to 3.3 V.
Technical data summary: UART at baud rate 57600 bps, MAVLink protocol version 2.0, operating voltage of 5 V, although it is tolerant to 3.3 V.